Overall Schematic
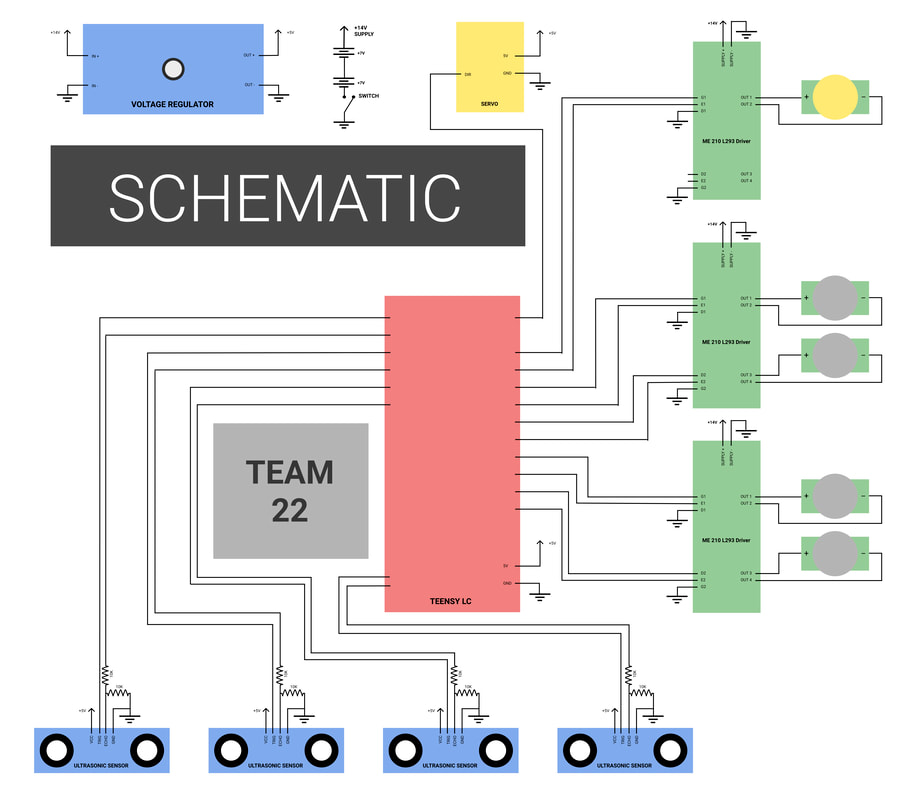
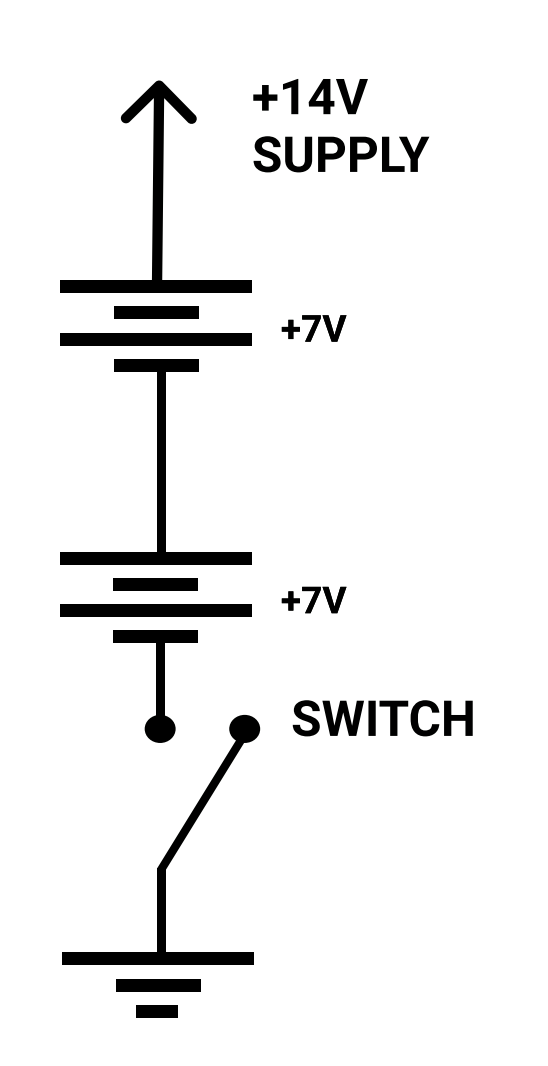
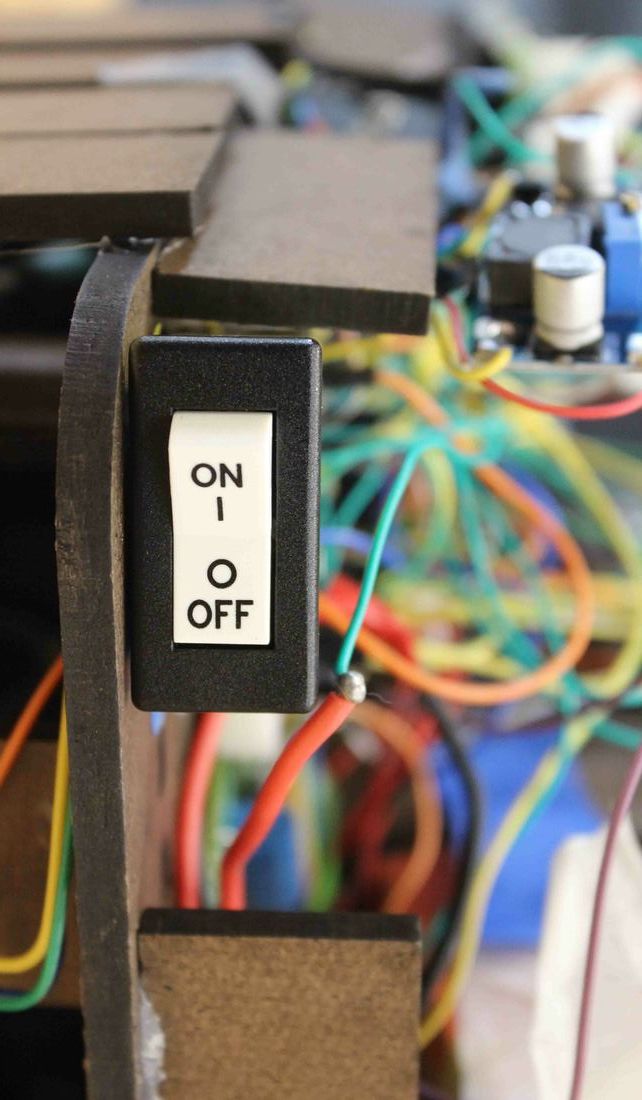
Circuit BreakerWe needed a higher voltage to drive the flywheel at our desired speed with sufficient torque to launch the ball. To do this, we put our batteries in series, creating a 14V power supply. The circuit breaker was used to power on/off the system by interrupting the current flow.
|
|
|
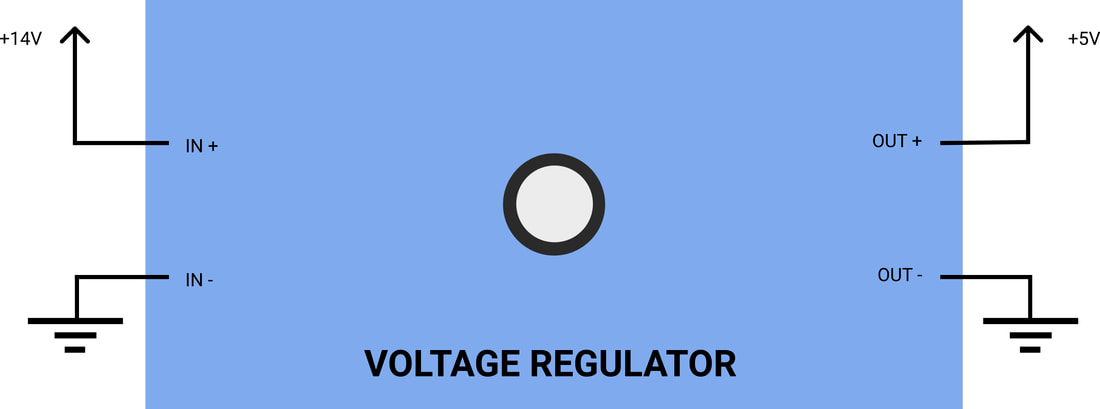
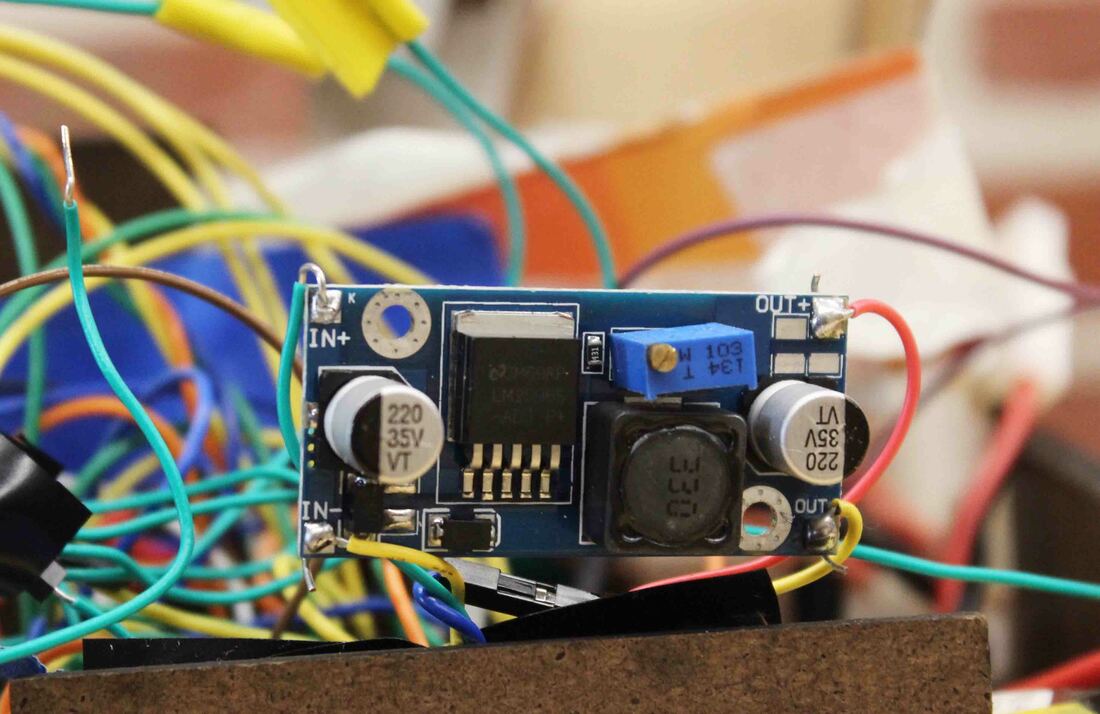
Voltage RegulatorBecause the operating voltage for our ultrasonic sensors and servo is 5V, we used a voltage regulator, which took the 14V input and outputted 5V.
|
|
|
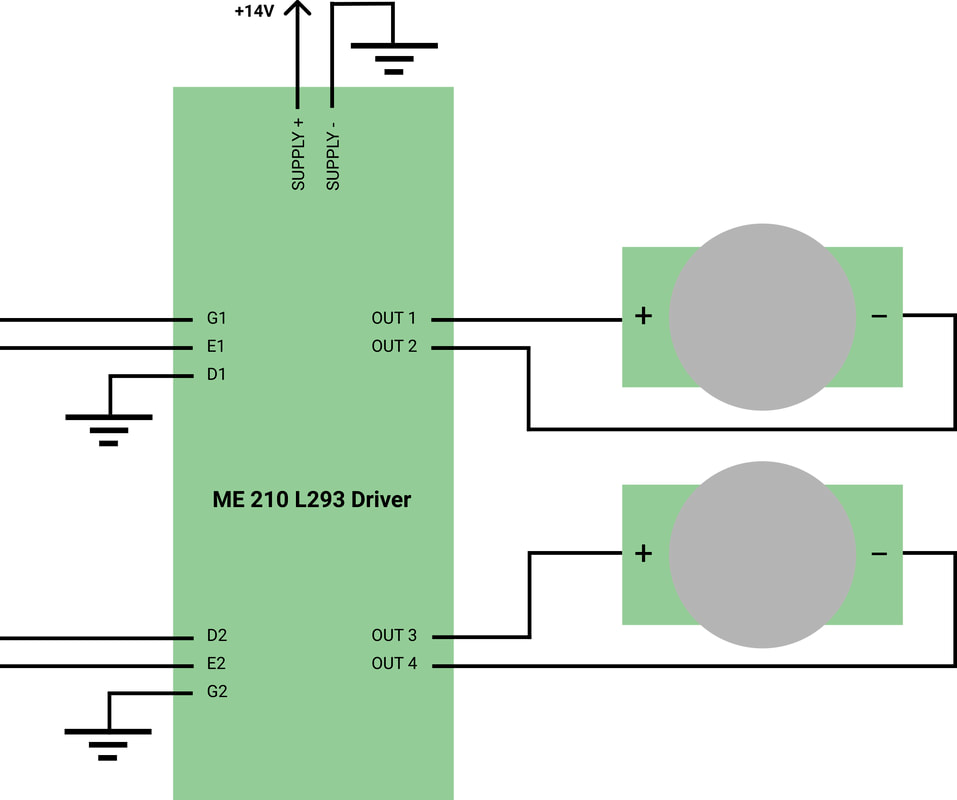
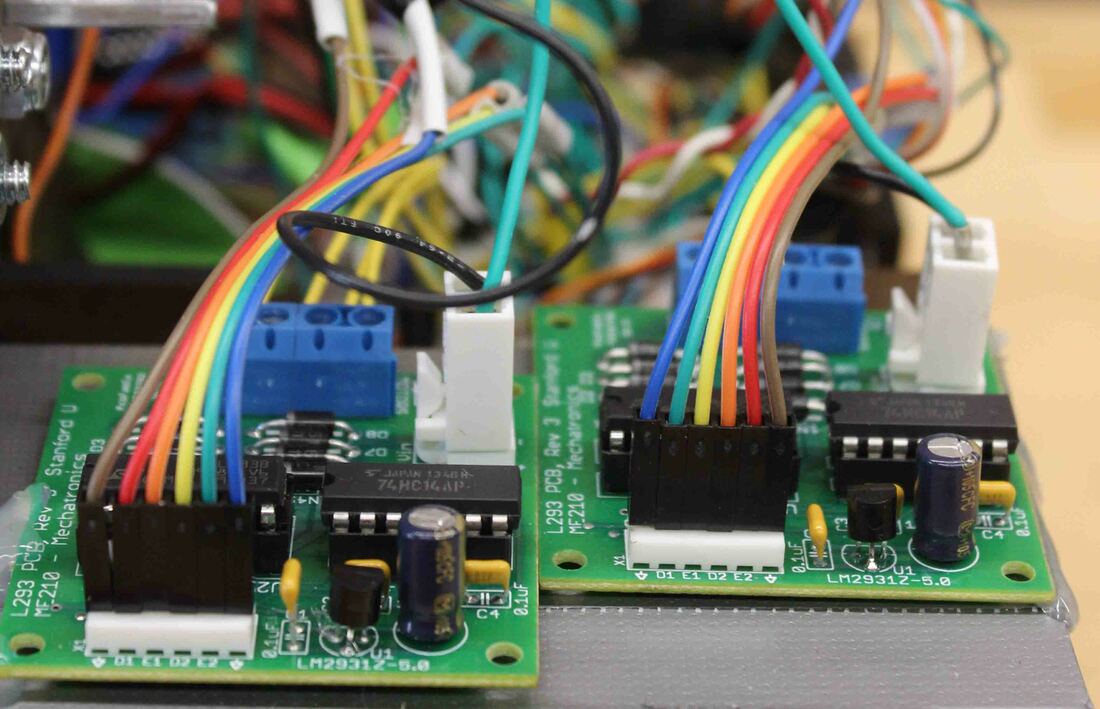
Motor Control - Wheels
|
Two H-Bridge L293 motor drivers were used to control the robot’s movement. This allowed us to use different voltages to run our Teensy LC microcontroller and motors, as well as change the direction of the wheels. One L293 controlled forward and left motion, and one controlled backward and right motion. For all enable pins, we used pull down resistors to disable the motors from running during initialization and startup.
|
|
|
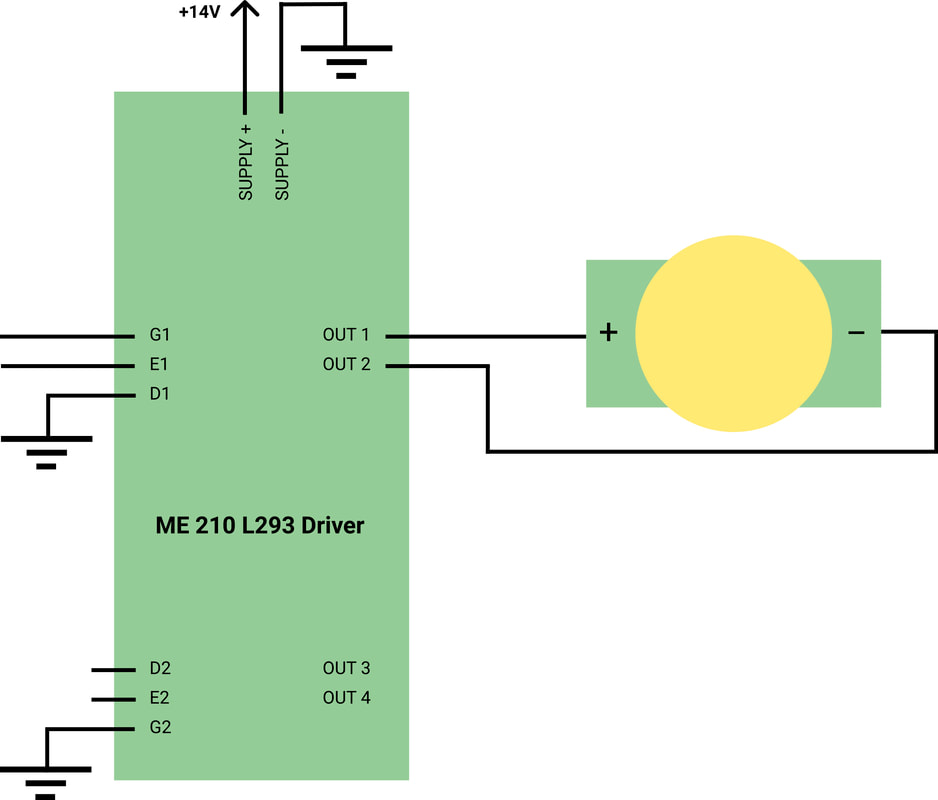
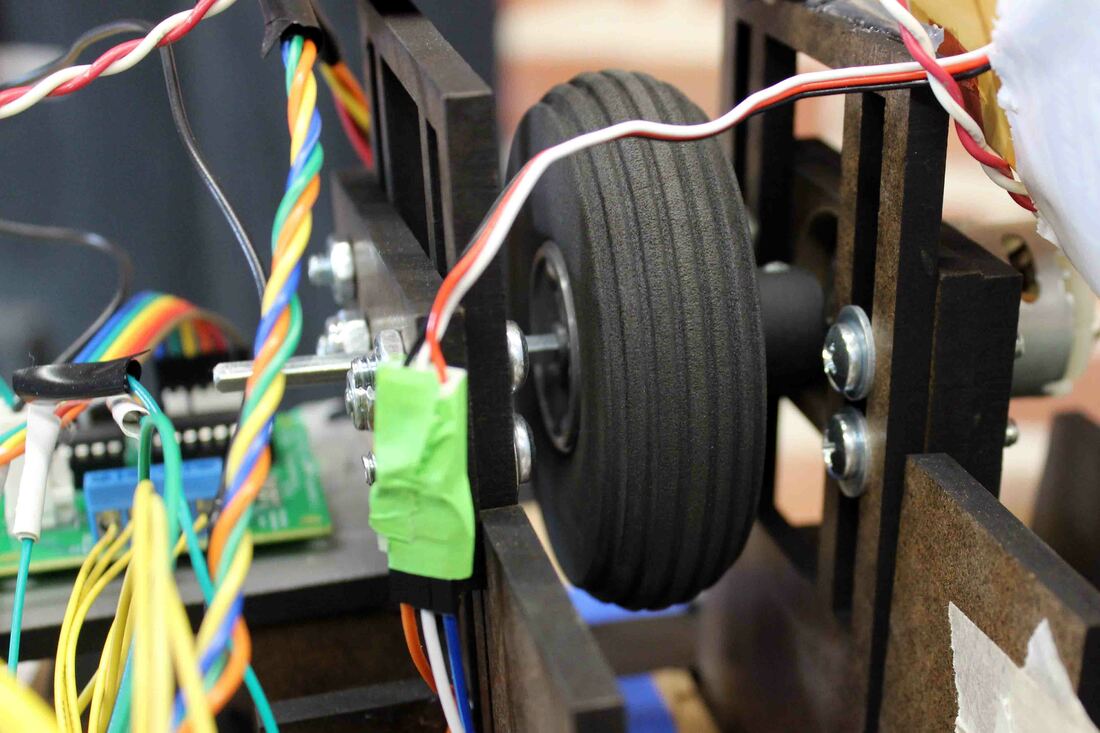
Flywheel Mechanism - MotorsA third H-Bridge L293 motor driver was used to control the flywheel motor. Similar to the motors for the wheels, the motor driver enabled us draw currents large enough to power the motors. Unlike the wheels, we did not alter the digital output for the direction pin.
|
|
|
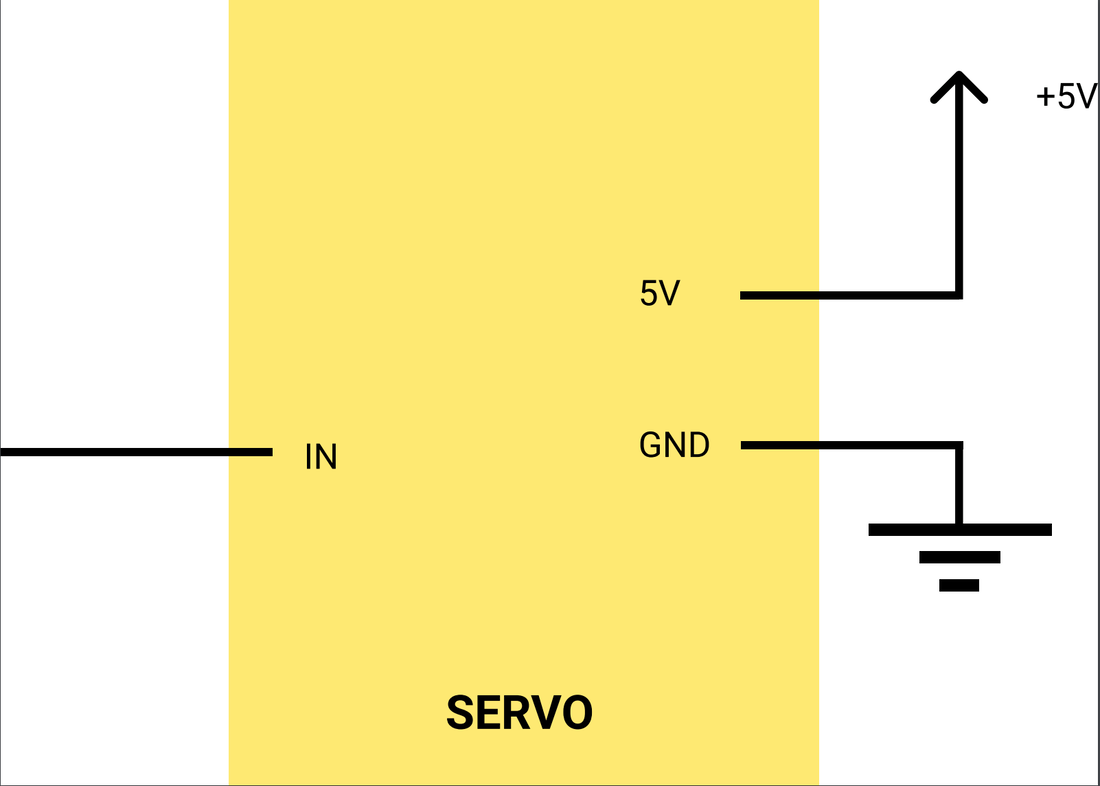
Flywheel Mechanism - ServoThe rotation of the servo was manipulated via the signal input pin, and was connected to a 5V input and ground.
|
|

|
Robot Start (short circuit)The robot’s program began to run when the designated "run" pin was pulled to an open circuit.
|
|
|
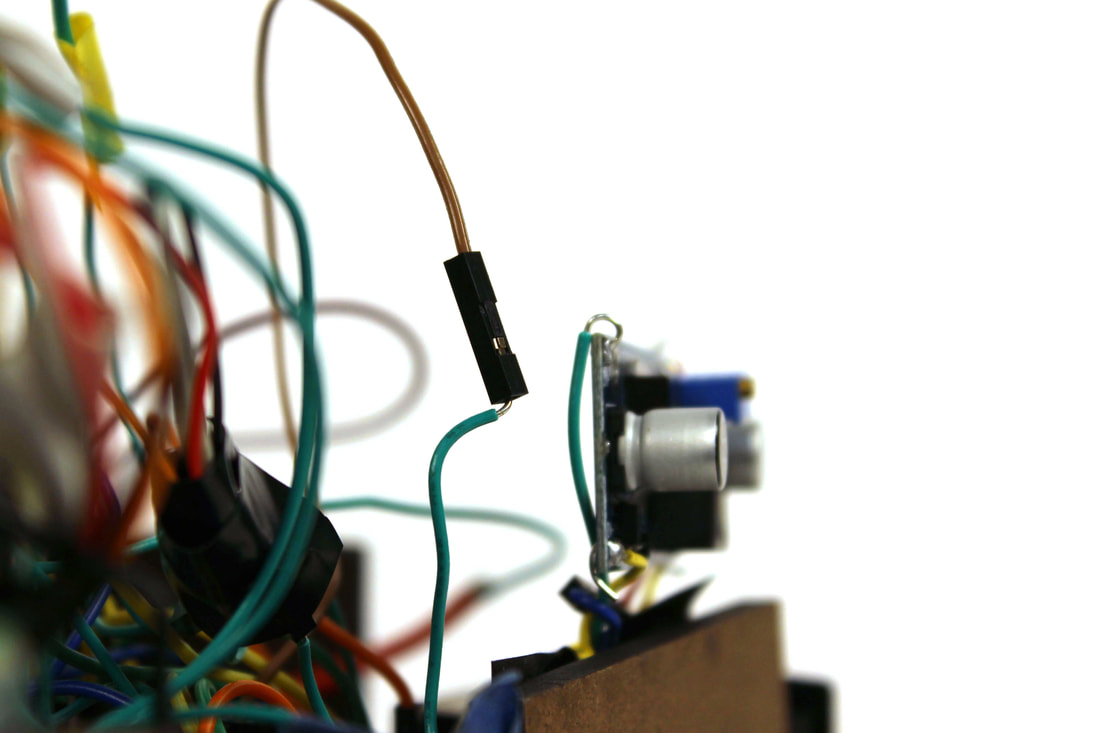
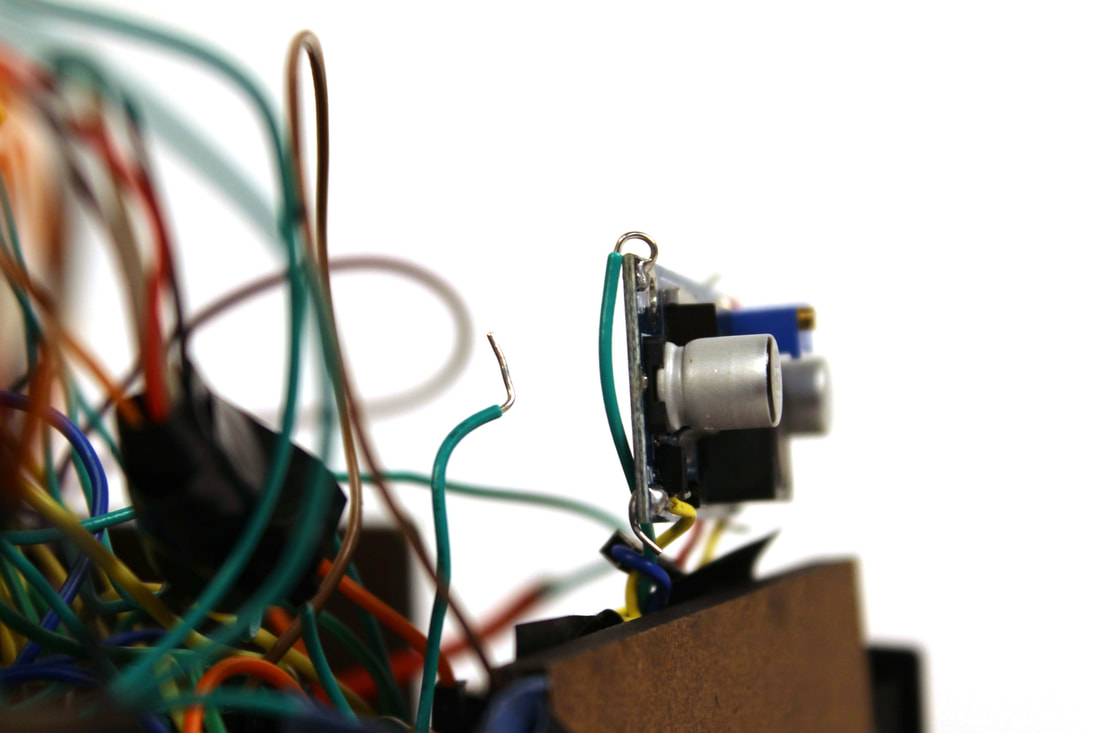
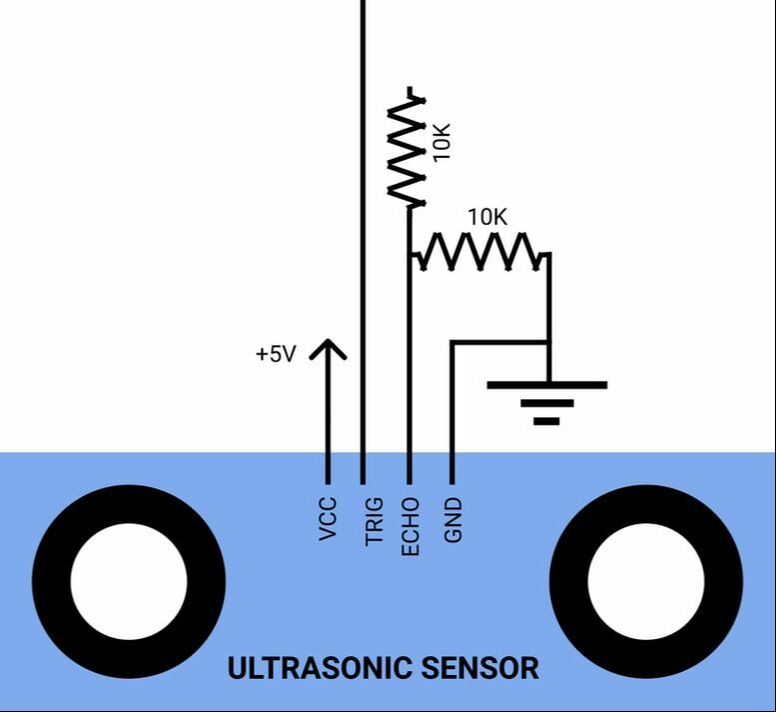
Ultrasonic SensingWe used 4 ultrasonic sensors (one on each side) to sense distance from the wall. All sensors were connected to a 5V input and ground. Two 10KOhm series resistors were used to reduce the signal input from the Echo pin to the Teensy, as we found that the Teensy pins were not 5V tolerant.
|
|
|
