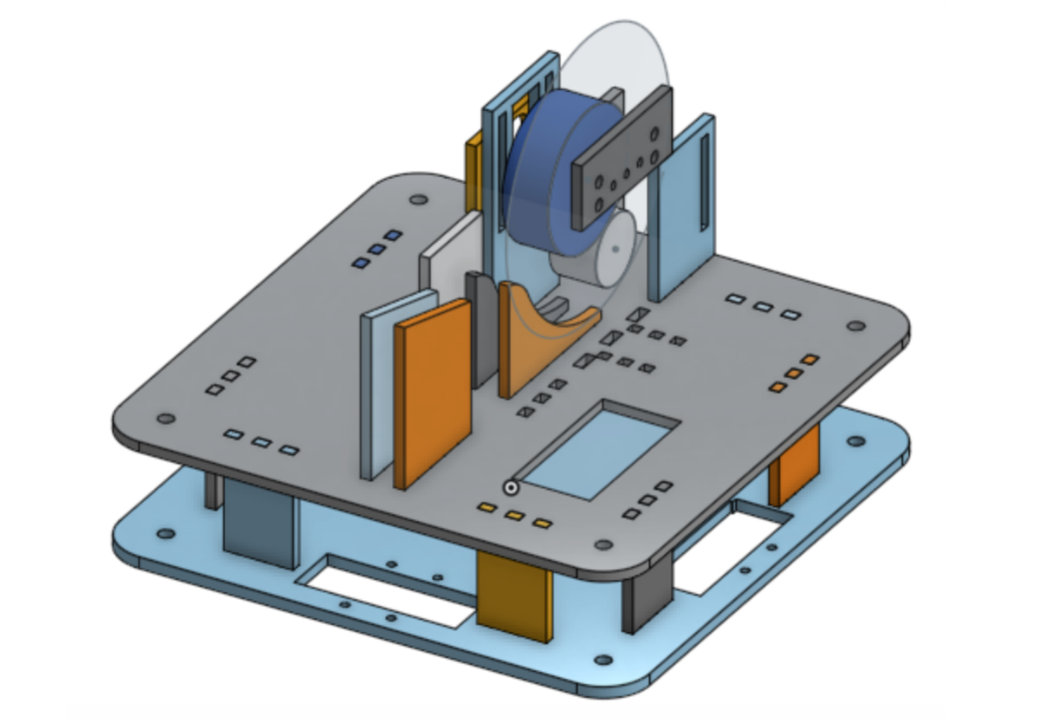
Overall CAD
Our overall design involved a two-tiered laser-cut shape, held together by simple laser-cut “jigsaw-puzzle” supports. Using OnShape, compatible with any operating system, allowed our design to be accessed by multiple teammates simultaneously, as well as to utilize imported functions (including the laser-joint function). Our design, with relevant functions and dimensions, can be found here.
Drive Train
|
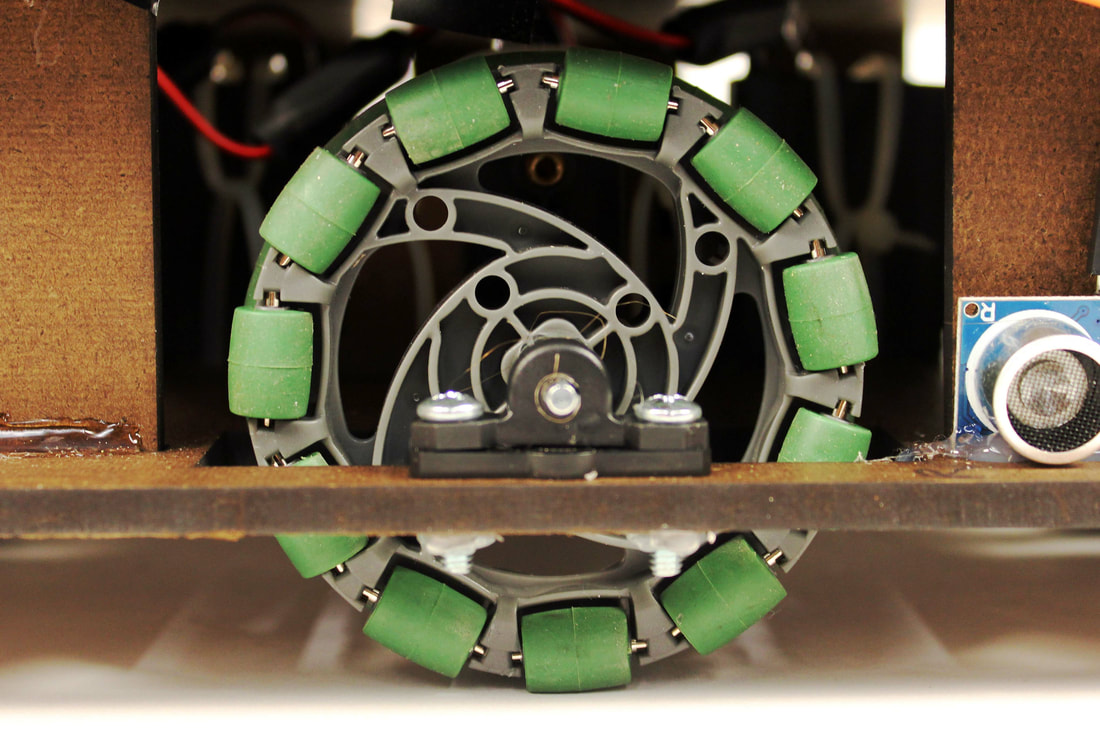
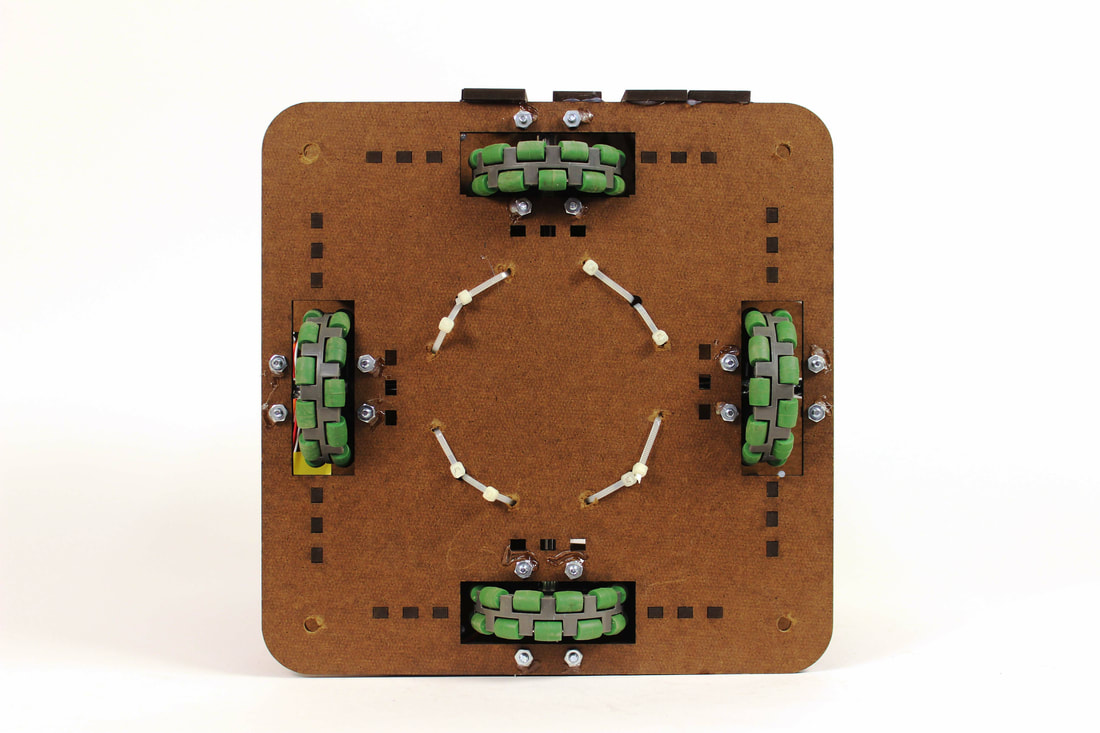
Component selection and our overall mechanical design were key to Raisin Bran’s successful mission execution. We began with design choices that were geared toward ease of use, circuitry, controls, and component acquisition. As such, we selected four 3.5” VEX Omni Wheels with square axels to characterize our powertrain, and the corresponding VEX 100-rpm 2-wire motors to drive our wheels (subsequently circumventing the need for shaft-couplings and saving dimensional space), oriented as depicted.
The motors had an adequate stall torque and fully loaded speed to move the robot around the game board and shoot down a tower within the 2:10 time window. Additionally, the Vex motors had a smaller physical profile than other easily accessible motors within the ME 210 store. Furthermore, the Vex motors could be mounted simply using several zip ties, with pillow blocks on either side of each wheel and shaft collars to simply support and constrain wheel-translation. This allowed for quick changes to the motor positioning during the project prototyping phase. This drivetrain configuration allowed Raisin Bran to operate quickly, utilizing two motors and two wheels when moving in either the x or y direction (forward/reverse and left/right), with minimal rolling resistance or additional motor calibration required. This eliminated the need to turn the robot to shoot at a target; the bot was always prepared to shoot straight forward. |
|
Ball Launch
|
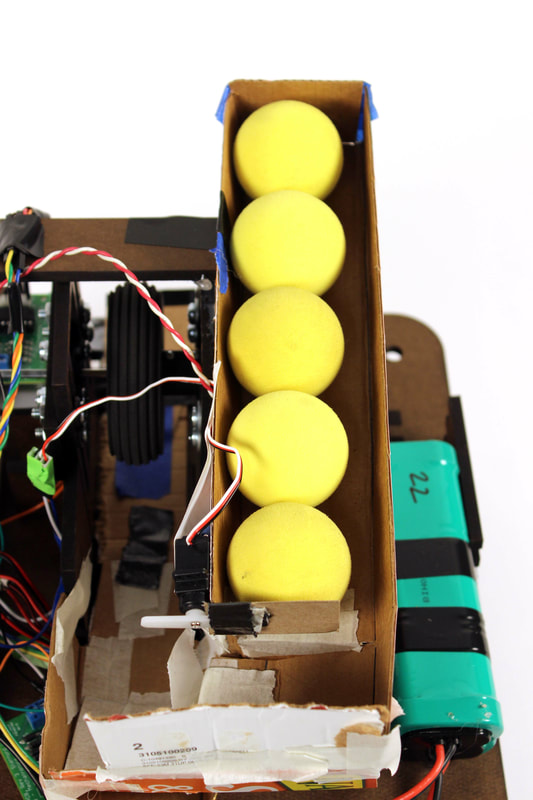
The second tier of our robot was dedicated toward circuitry housing and our ball storage and launching mechanism. Our launch mechanism utilized a flywheel, gravity, and a servo-”gate” that, when opened, allowed our bot to rapid-fire up to five nerf-balls. The positioning of our flywheel, motor mounts, and supports were modeled accurately in OnShape, with final alignment important to reduce the added impedance to our flywheel motor.
Our team explored a multitude of options for our “gate”, including a push-pull solenoid, and ultimately decided to take advantage of the simplicity and repeatability of the servo. Lastly, our storage and launching ramps were prototyped using cereal boxes and adjusted by hand to best utilize gravity and the balls’ rolling resistance and achieve accurate launching projectile-motion. The 180 degree curve in the ramp allowed just enough time for the motor to ramp up to full speed between the delivery of each ball, whilst ensuring our robot-height did not exceed twelve inches |
|
Button Depress
|
While testing the robot on the gameboard, we noticed something peculiar . Despite approaching the reload button and appearing to press the button, the button failed to be pressed by the robot. Upon closer inspection, we recognized that the reload button was located between our two duron layers. The edge of the robot would strike the wall before the bottom could be pressed. A quick use of recycled duron and hot glue solved this problem.
|
|
